전동 어시스트형 휠체어의 다기능 주행 제어
고령자 및 장애인의 일상생활 지원 및 대표적인 이동지원 기기의 하나인 전동 어시스트형 휠체어의 제어 기술이 세간의 주목을 받으며 다양한 연구가 진행되고 있다. 본고에서는 일본의 전동 어시스트 휠체어의 다기능 주행 제어 시스템과 그 연구사례를 소개한다. 번역·정리 김대근 기자 전동 어시스트 휠체어와 제어시스템 인간의 생활지원을 목적으로 하는 전기계측·제어 기술에 관한 하나의 연구사례로서, 고령자 및 장애자의 행동반경을 넓히는 이동기기로 주목을 받고 있는 ‘전동 어시스트 휠체어’의 다기능 주행 제어 시스템에 대해 소개한다. [그림 1]에 보이는 전동 어시스트형 휠체어는 사람이 입력한 힘을 전기모터로 보조하여 그 증폭된 힘을 가지고 구동되며, 고령자 및 장애자의 행동반경을 확장시켜 기대를 모으고 있는 분야이지만, 좌우 바퀴의 각각에 전기모터가 구비된‘ 독립구동식’이라는 점과 실제 주행환경 또한 천차만별이기 때문에 그 어시스트 주행제어법에 있어 개선과 고안이 필요하다. 전동 휠체어 및 상지와 하지 보조기기 등의 복지응용 제어시스템은 일반 산업응용분야의 운동제어시스템과는 달리, 반드시 사람이 깊이 개입해야 하기 때문에 인간 친화성 및 유연성이 요구되며, 제어계 내의 도입 시 이러한 점들을 고려해서 진행해야 한다. 본고에서는 그러한 전동 어시스트 휠체어의 고성능 제어시스템의 연구사례로서 조작성 및 승차감의 향상을 실현하는 몇 가지 개념들에 대해 살펴본다.

조작성 향상 제어
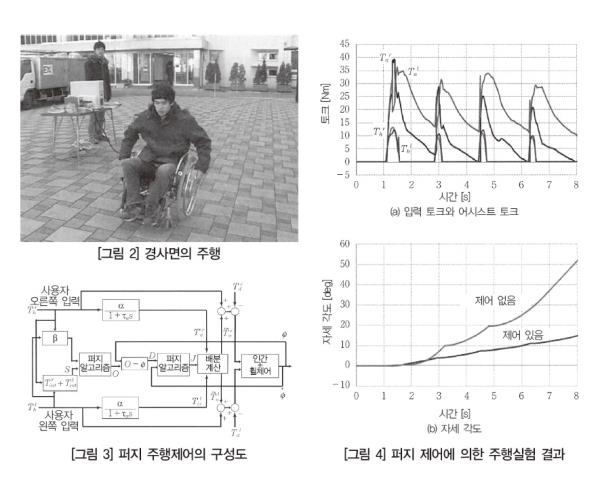
이 장에서는 좌우 바퀴의 독립 구동인 휠체어에 있 어서 사용자의 입력 토크 및 주행환경을 고려한 조작성 향상 제어의 일례를 소개한다. 좌우 바퀴의 어시스트 토크의 균형을 유지하면서 사용자의 의지대로 직진 및 선회주행을 하는 동시에 복잡하고 다양한 노면에 있어서도 안정된 주행을 실현하는 전동 휠체어에 대한 니즈가 높아지고 있다. 휠체어가 [그림 2]와 같은 경사면을 직진하려고 하는 경우, 좌우 바퀴에 같은 어시스트 토크를 생성하면 중력의 영향에 의해 좌측으로의 선회가 예상된다. 조작성 향상을 실현하는 데에는 좌우 바퀴의 입력 토크의 비(比)와 크기, 휠체어의 자세 각도 등에 주목할 필요가 있다. 여기서는 이러한 정보를 바탕으로 퍼지 추론을 이용하여 좌우 바퀴에 주어야 할 어시스트 토크 배분의 결정에 대해 살펴본다. [그림 3]에 퍼지 추론을 이용한 주행제어의 구성도를 나타냈다. 여기서는 2단계의 추론을 이용하고 있다. 처음에 페달을 1회 돌릴 시 좌우 바퀴의 입력 토크 적분치에 대해 그것들의 합 S와 비 β를 구하고, 이 정보로부터 퍼지 추론에 의해 목표 주행 각도 O를 추정한다. 그 다음에 실제 주행각도와의 차 D와 자세각(姿勢角) 속도로부터 퍼지 추론에 의해 좌우 바퀴의 어시스트 토크 배분비 J를 추정한다. [그림 4]에 경사면 주행실험 결과의 일례를 나타냈다. 이는 퍼지 제어(Fuzzy Control)를 이용한 경우와 그렇지 않은 경우를 비교한 것이다. 사용자의 입력 토크는 좌우가 거의 같지만, 경사면을 직진시키기 위해서 좌우 바퀴에는 다른 어시스트 토크가 생성되어 그 결과, 자세 각도도 직진 방향으로 유지되고 있음을 알 수 있다.
최적 가감속 제어 이 장에서는 승차감 및 안정주행에 깊은 관련이 있는 가감속 제어의 예를 소개한다. 전동 어시스트 휠체어의 주행제어를 실시함에 있어 승차감의 향상을 고려하여 보다 원활한 가감속을 실현하기 위해 가속도의 변화율인 가가속도(加加速度)의 크기를 제어하는 궤도를 설계함과 동시에 그것이 사용자의 입력 토크에 따라 유연하게 생성되도록 해야 한다. 이러한 주행제어의 예로서 약도(躍度) 최소모델을 응용한 방법을 소개한다. 이것은 가가속도의 동의어인 약도(躍度)를 운동시간에 걸쳐 적분한 값이 최소가 되는 궤도를 5차식으로 표현한 것이다. 5차 다항식의 6개의 계수를 결정하는 것이 시점과 종점의 위치, 속도, 가속도의 경계조건이다. 전동 어시스트 휠체어의 주행에 있어서 이러한 궤도를 설계하는 데에는 사용자가 어느 정도 토크의 입력을 마칠 때까지 가상 임피던스 제어 등으로 주행시켜, 입력 토크의 크기를 읽어내고, 이를 바탕으로 사용자가 원하는 주행거리 및 주행시간을 추정하여 궤도를 설계한다. 이 거리 및 시간이 앞서 말한 경계조건이 되며, 계수를 구해 궤도를 결정한다. [그림 5]에 주행실험 결과의 일례를 나타냈다. 바퀴 각도의 지령치를 5차식으로 표현하여 피드백 제어를 실시하고 있다. 약도 최소 궤도의 절체 부분도 포함해 전체적으로 원활한 가감속이 실현되고 있음을 알 수 있다. 다음으로 가가속도의 순시치를 바탕으로 가가속도 및 가속도의 최대치를 제한하는 속도 패턴을 생성하여 승차감 및 안정성을 향상시키는 방법도 생각해볼 수 있다. 사용자의 입력 토크가 증가하고 있는 사이는 휠체어가 가속해야 하므로 가가속도를 지정한 제한치까지 직선적으로 증가시키며, 토크가 감소함과 동시에 가속을 종료하기 위해 가가속도를 0으로 감소시킨다. 이때 가속도를 어떤 지정값으로 제한시키도록 가가속도를 조정할 수도 있다. 다음에 가가속도를 음(-)으로 하여 가속도를 0으로 만들고, 등속주행으로 바꾼 뒤에 감속을 위해 가가속도를 음(-), 0, 양(+)의 순으로 변화시켜나가면 된다. [그림 6]에 주행실험 결과의 일례를 나타냈다. 각각 입력 토크, 가가속도 생성값 α, 가속도 생성값 aref, 속도응답υ을 나타내고 있다. 전체적으로 원활한 가감속이 실현되고 있다. 이 방법에서는 가속과 감속이 각각 독립에 유연한 속도 패턴을 생성할 수 있다는 것이 이점이다. 실제의 주행 시 급가속의 경우에는 등받이에 밀리는 듯한 느낌을 받거나, 급정지시의 경우에는 앞으로 튀어나갈 듯한 느낌이 있을 수 있지만, 이 현상을 방지하는 데에 바로 이 방법이 유효하다고 할 수 있다. 또한, 오르막에서 현저해지는 앞바퀴가 들리는 현상이나 후방전도(後方轉倒) 현상을 방지하고, 내리막의 안전주행에 있어서도 효과를 발휘하는 것으로 기대되고 있다. 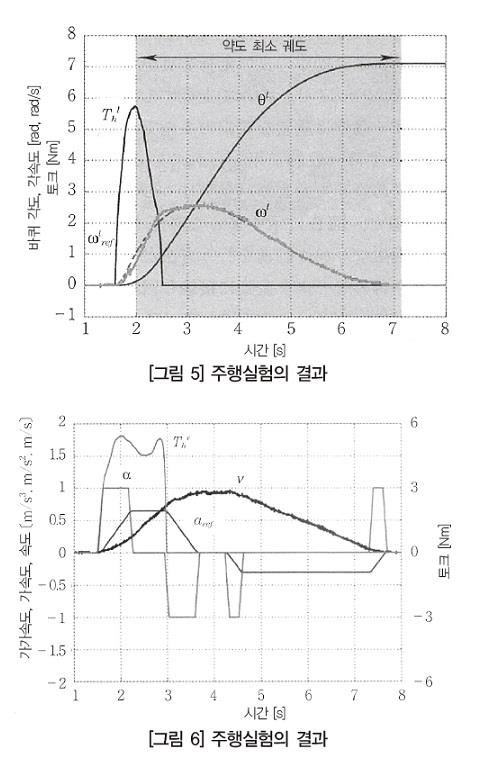
회생 브레이크 제어
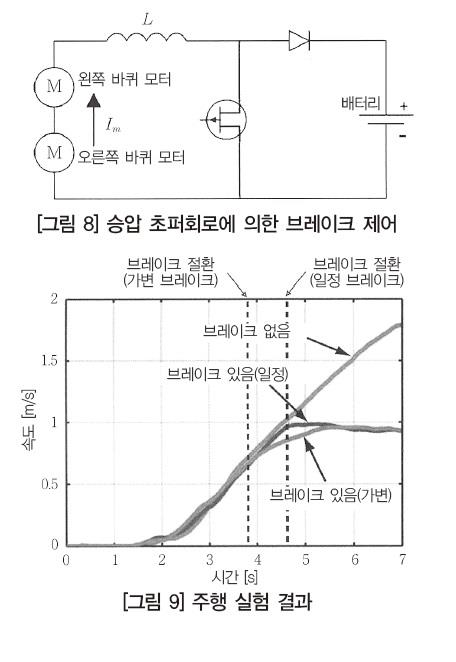
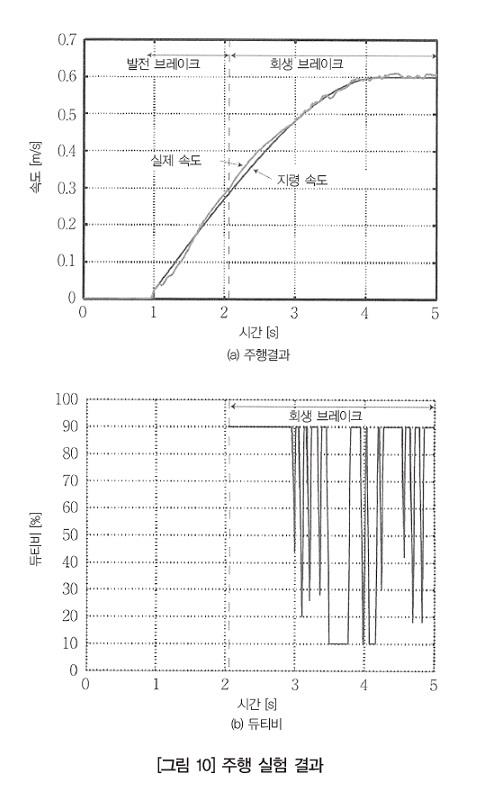
[그림 7]에서 보이는 것처럼 내리막 주행에서는 어떠한 방법으로든 브레이크력을 발생시키지 않으면 속도가 초과되어 예를 들면 통행인이나 벽, 장해물과의 격돌 및 휠체어의 전도 등 위험성이 높아질 뿐만 아니라, 무엇보다도 사용자에게 커다란 공포감을 심어주게 된다. 전동 어시스트 휠체어는 좌우 핸드림(미는 바퀴, Push Rim)이 사용자에게 있어 유일한 입력장치이며, 주행 중에 조작 가능한 브레이크 기능은 구비되어 있지 않다. 실제로 사용자는 핸드림을 붙잡고 손의 마찰에 의해 제동을 걸 수밖에 없으며, 이것은 사용자의 부담이 커지는 동시에 좌우 마찰력에 차이가 생겨 예상 밖의 방향으로 선회해버릴 수 있다는 위험성을 의미한다. 이러한 문제를 해결하기 위해 전기철도 및 전기자동차 등에서 적용되고 있는 회생제동 제어를 응용하여 내리막 경사면의 속도 상승을 억제하기 위한 브레이크력을 얻고, 또한 에너지 효율이 우수한 주행을 실현시키는 방책을 강구하고 있다. 배터리만으로 주행하는 전동 휠체어에 있어서 에너지 효율은 중요한 요소 중의 하나이다. 전동 휠체어에 일반적으로 사용되고 있는 직류 모터에 있어서 모터의 역기전력보다 배터리의 전압이 크다는 점을 고려하면 [그림 8]에 나와 있는 승압 초퍼회로의 적용을 통해 회생 브레이크 제어를 실시하는 방법을 생각해볼 수 있다. 그림과 같이 좌우 바퀴의 모터를 직렬로 연결하여 회로 내의 전류를 크게 함으로써 브레이크력을 증가시킬 수도 있다. 또한 스위칭을 위한 PWM(펄스폭 변조) 신호의 충격 계수를 조정하면 브레이크력이 변화하기 때문에 속도 상승에 따라 브레이크력을 서서히 강화시키는‘ 가변 듀티비 제어’도 생각해볼 수 있다. [그림 9]는 경사각이 약 6도인 내리막길에서 실시한 회생 주행 실험의 일례이며, 그림 안의 파형은 각각 브레이크가 없는 상태, 일정 듀티비, 가변 듀티비의 경우에 해당되는 속도파형이다. 가변 듀티비에 의한 회생제동 주행을 통해 원활한 속도 변화를 수반하는 브레이크 제어가 실현되고 있음을 알 수 있다. 또한 내리막길에 들어서자마자 적절한 속도지령을 생성하고, 듀티비의 조절을 통해 이에 추종 주행하는 피드백 제어도 생각해볼 수 있다. 속도지령의 일례로서 앞에서 기술한 약도 최소모델의 적용을 들 수가 있다. 속도지령은 4차식이지만 실제의 속도가 이를 넘어서면 브레이크력을 높이기 위해 듀티비를 늘리고, 반대이면 듀티비를 줄이는 조정에 의해 추종한다. [그림 10]에 경사각이 약 4.5도인 내리막길에서 실시한 회생 주행 실험의 일례를 나타냈다. 약도 최소모델을 바탕으로 한 속도지령에 있어서 적절한 브레이크 제어에 의해 추종 가능하며, [그림 9]의 결과와 마찬가지로 원활한 속도변화를 수반하는 내리막 주행의 실현이 가능하다. 내리막길에서는 속도제어 및 안전 주행, 승차감의 확보 등이 우선순위로 고려돼야 하기 때문에 이 장에서는 주로 이를 목적으로 한 주행제어의 결과를 살펴보았으나, 회생제동에 의한 에너지 효율 향상 및 그 평가에 대해서도 향후 충분한 검토를 거칠 필요가 있다. 어시스트형 휠체어에 국한하지 않고, 조이스틱형 전동 휠체어 및 전동카트에도 회생 브레이크를 적용할 수 있으며, 배터리가 아닌 커패시터를 축전 장치로 사용하여 승강압 초퍼회로 등을 통한 에너지 회생도 생각해볼 수 있다.
*
이 장에서는 고령자 및 장애자의 생활반경을 넓히는 이동지원 기기의 하나인 전동 어시스트 휠체어의 다기능 주행 제어 시스템에 관한 연구사례를 몇 가지 소개하였다. 향후의 전개로서 오르막길과 복잡한 형태의 다양한 노면 상태, 그리고 다양한 기호와 신체적 특징을 가진 사용자에 대해 유연한 대응이 이루어질 수 있도록 주행 제어 시스템의 충분한 검토가 요구되고 있다. <Energy News>
http://www.energy.co.kr
|